Real Time Precise Point Positioning
Precise point positioning (PPP) is based on the observations of a single GNSS receiver. The method is based on employing measurement corrections to the observations from a single receiver. These corrections can be classified according to the measurement error source as satellite related, atmospheric, and receiver and operational environment.
The basic PPP principle uses the first category, satellite related errors, which include precise satellite orbits (positions), clock corrections, and the satellite phase centre offset. Some errors that are usually ignored in the traditional relative positioning have to be taken into account. These errors are mainly attributed to physical phenomena, and include:
- Relativity error, which is a function of the satellite motion and the Earth’s gravity.
- Sagnac delay caused by the Earth’s rotation while the satellite signal is travelling between the satellite transmitting antenna and the receiver antenna.
- Phase wind up, caused by relative rotations between the satellite and the receiver.
- Site displacement effects due to Earth and ocean tides and atmospheric loading.
- The inter-frequency bias, which is needed when processing single-frequency measurements.
In case of observable on multiple-frequencies the dominant part of the ionospheric error (first order term) can be eliminated or estimated. For single frequency receivers, the use of ionospheric corrections from an external source, such as a local network or the Global Ionosphere Maps (GIM) is then needed.
Due to phase offsets at the satellite and other errors that encounter the carrier phase while it travels from satellite to receiver the unknown number of full cycles can not be fixed to an integer number, but can be estimated as a real valued number. Estimating the real valued number of ambiguities in PPP is known as initialisation. PPP can give accuracies ranging from centimetres for static receivers to decimetres for a kinematic receiver when GNSS products such as precise orbits, final ionospheric delays and differential code biases are used.
Real time corrections
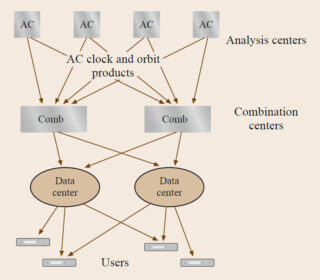
For real time applications precise IGS products cannot be used, because these are only available with a delay of up to weeks after data collection. Predicted Global Ionopsheric Maps (GIMs) are available with a sufficient accuracy for real time applications, but predictions of clock offsets and drifts, which are provided for example in the predicted part of the IGS ultra-rapid orbits or the broadcast ephemerides, deviate quickly from the true values by several decimetres or even meters. This deviation is caused by the stochastic clock noise and frequency variations of the atomic frequency standards of the GPS satellites. Predicted orbit/clock-products with an age-of-data of several hours are therefore unusable for PPP applications, which require a carrier-phase based positioning accuracy down to centimetre level. For this reason some systems has been developed in scope of the IGS Real Time Pilot Project to create real time clock corrections. These clock products are globally valid and disseminated to real-time users via (Networked Transport of RTCM via Internet Protocol) NTRIP-streams from a caster with a typical latency of 2-3 seconds. Our research on Real Time PPP focuses on algorithm development to achieve fast and reliable solution using the best GNSS products available in real time.